Obtenga beneficios adicionales
Aún no tiene una suscripción a Virtual Pro?
Para acceder a este contenido se requiere una suscripción
Obtenga beneficios adicionales
Aún no tiene una suscripción a Virtual Pro?
Para acceder a este contenido se requiere una suscripción
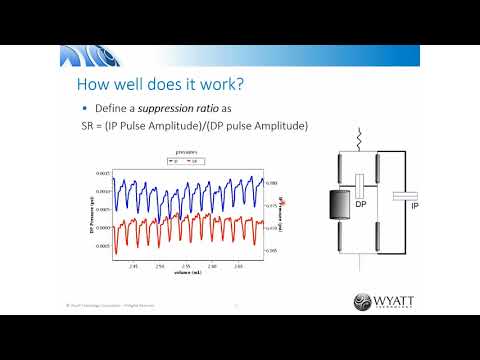
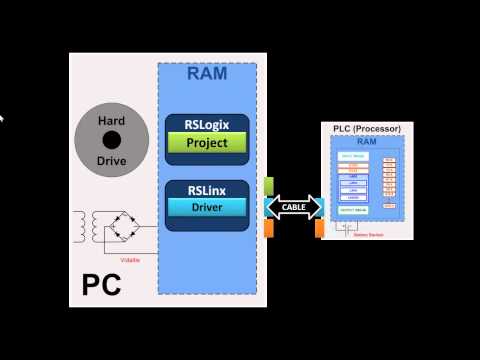
En este trabajo evaluamos una interfaz cerebro-ordenador (BCI) semiautónoma para tareas de manipulación. En este sistema, el usuario controla un brazo robótico mediante comandos de imágenes motoras. En los sistemas BCI tradicionales de control de procesos, el usuario tiene que proporcionar esos comandos continuamente para manipular el efector del robot paso a paso, lo que resulta un proceso tedioso para tareas sencillas como coger y volver a colocar un elemento de una superficie. En este caso, adoptamos un enfoque semiautónomo basado en un modelo de álgebra geométrica conforme que resuelve la cinemática inversa del robot sobre la marcha, y luego el usuario sólo tiene que decidir el inicio del movimiento y la posición final del efector (enfoque de selección de objetivos). En estas condiciones, implementamos tareas de coger y colocar con un disco como objeto y dos áreas de destino colocadas en la mesa en posiciones arbitrarias. Se utilizó un algoritmo de visión artificial (AV) para obtener las posiciones de los artículos expresadas en el marco del robot a través de imágenes capturadas con una cámara web. A continuación, el algoritmo de AV se integra en el modelo de cinemática inversa para realizar las tareas de manipulación. Como prueba de concepto, se entrenó a diferentes usuarios para que controlaran las tareas de recoger y colocar mediante los enfoques de control de procesos y de selección de objetivos semiautónoma, de forma que se pudiera comparar el rendimiento de ambos esquemas. Nuestros resultados muestran la superioridad en el rendimiento del enfoque semiautónomo, así como la evidencia de una menor fatiga mental con él.
Esta es una versión de prueba de citación de documentos de la Biblioteca Virtual Pro. Puede contener errores. Lo invitamos a consultar los manuales de citación de las respectivas fuentes.
Artículo:
Comportamiento a flexión de losas de hormigón armado mezcladas con nano y microsílice
Artículo:
Superficies nanométricas de titanio para implantología dental: Efectos biológicos, biocompatibilidad y seguridad
Artículo:
Estudio experimental sobre la paliación de lesiones deportivas mediante el cribado de datos de imágenes biológicas motoras funcionales
Artículo:
Monitorización de torres de transmisión eléctrica con sistema de nivelación hidrostática: Perfeccionamiento de las mediciones y evaluación del rendimiento
Artículo:
Un modelo híbrido de detección de anomalías semisupervisado para datos de alta dimensión
Folleto:
Análisis de rentabilidad económica y financiera
Artículo:
¿Por qué debemos conservar la fauna silvestre?
Artículo:
Control y vigilancia de la calidad del agua de consumo humano
Manual:
Deshidratación y desecado de frutas, hortalizas y hongos. Procedimientos hogareños y comerciales de pequeña escala
Virtual Pro es un portal virtual de formación, investigación y comunicación especializado en procesos industriales.

� 2021, Virtual Pro �, una marca de Grupo INGCO. Todos los derechos reservados