Obtenga beneficios adicionales
Aún no tiene una suscripción a Virtual Pro?
Para acceder a este contenido se requiere una suscripción
Obtenga beneficios adicionales
Aún no tiene una suscripción a Virtual Pro?
Para acceder a este contenido se requiere una suscripción
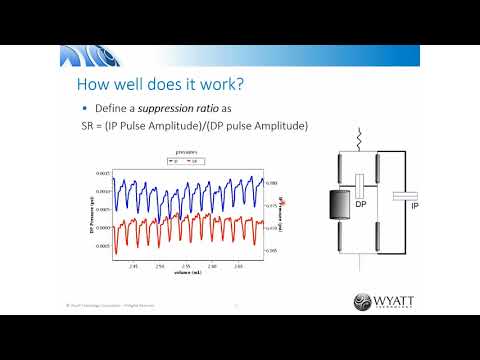
En este trabajo se estudia el control iterativo de aprendizaje (ILC) por inversión de modelo para una clase de sistemas multientrada multiresultado (MIMO) lineales no cuadrados variantes/invariantes en el tiempo. Se desarrolla un nuevo algoritmo ILC basado en la inversión σ-derecha de matrices de ganancia de aprendizaje no cuadradas para resolver los problemas de inversión de matrices que aparecen en la inversión directa de modelos de sistemas MIMO no cuadrados. Además, se establece una condición de convergencia monotónica suficiente y necesaria. Mediante un análisis riguroso, el esquema ILC propuesto garantiza la convergencia del error de seguimiento. Para demostrar la eficacia e ilustrar el rendimiento del enfoque propuesto para sistemas no cuadrados lineales invariantes en el tiempo (LTI) y variables en el tiempo, se simulan dos ejemplos ilustrativos.
Esta es una versión de prueba de citación de documentos de la Biblioteca Virtual Pro. Puede contener errores. Lo invitamos a consultar los manuales de citación de las respectivas fuentes.
Artículo:
Modelización y simulaciones hidroespaciales para evaluar las pérdidas de transporte por canales de riego
Artículo:
Integración entre los modelos de transporte y el análisis coste-beneficio para apoyar las prácticas de toma de decisiones: Dos aplicaciones en el norte de Italia
Artículo:
Funciones E-Invex Generalizadas Diferenciables y sus Aplicaciones en Optimización
Artículo:
Un nuevo esquema de ordenación eficiente para la detección de esferas
Artículo:
Evaluación del rendimiento de los sistemas de compresión de datos aplicados a las imágenes de satélite
Folleto:
Análisis de rentabilidad económica y financiera
Artículo:
¿Por qué debemos conservar la fauna silvestre?
Artículo:
Control y vigilancia de la calidad del agua de consumo humano
Manual:
Deshidratación y desecado de frutas, hortalizas y hongos. Procedimientos hogareños y comerciales de pequeña escala
Virtual Pro es un portal virtual de formación, investigación y comunicación especializado en procesos industriales.

� 2021, Virtual Pro �, una marca de Grupo INGCO. Todos los derechos reservados