Obtenga beneficios adicionales
Aún no tiene una suscripción a Virtual Pro?
Para acceder a este contenido se requiere una suscripción
Obtenga beneficios adicionales
Aún no tiene una suscripción a Virtual Pro?
Para acceder a este contenido se requiere una suscripción
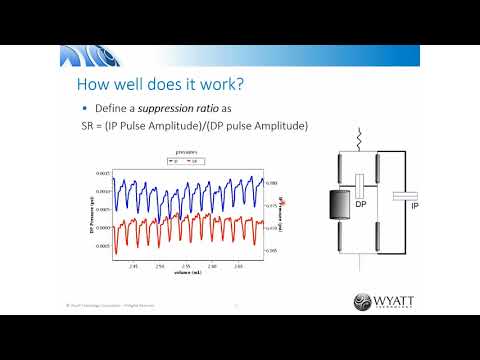
El objetivo de este estudio es investigar el rendimiento de un robot paralelo de 6 DoF en el seguimiento del movimiento de la trayectoria del pie de una pierna parética durante una sola zancada. Se han medido y analizado las trayectorias de los pies de nueve pacientes con una pierna parética, tanto hombres como mujeres, mediante un sistema Vicon en un laboratorio de marcha. Basándose en el análisis cinemático y dinámico de un robot paralelo UPS de 6 DoF, se desarrolló un algoritmo en MATLAB para calcular la longitud de los actuadores y sus fuerzas necesarias durante todas las trayectorias. A continuación se investigó el espacio de trabajo y los puntos de singularidad del robot en nueve casos diferentes. Se diseñó y construyó un prototipo de robot paralelo UPS de 6 DoF con alta repetibilidad para simular una sola zancada. Los resultados mostraron que el robot era capaz de seguir todas las trayectorias con un error de posición máximo de 1,2 mm.
Esta es una versión de prueba de citación de documentos de la Biblioteca Virtual Pro. Puede contener errores. Lo invitamos a consultar los manuales de citación de las respectivas fuentes.
Artículo:
Poliuretano derivado de Ricinus Communis como injerto para tratamientos de defectos óseos
Artículo:
Desarrollo de un analizador portátil de gases respiratorios para la medición indirecta del gasto energético en reposo (REE)
Artículo:
Exploración de los objetivos de gestión del espacio en los centros asistenciales institucionales de China
Artículo:
Películas delgadas de silicio nanocristalino hidrogenado preparadas por el método de hilo caliente con presión de proceso variable
Artículo:
Una nueva estructura de búsqueda de precisión y similitud basada en filtros Bloom paralelos
Folleto:
Análisis de rentabilidad económica y financiera
Artículo:
¿Por qué debemos conservar la fauna silvestre?
Artículo:
Control y vigilancia de la calidad del agua de consumo humano
Manual:
Deshidratación y desecado de frutas, hortalizas y hongos. Procedimientos hogareños y comerciales de pequeña escala
Virtual Pro es un portal virtual de formación, investigación y comunicación especializado en procesos industriales.

� 2021, Virtual Pro �, una marca de Grupo INGCO. Todos los derechos reservados