Obtenga beneficios adicionales
Aún no tiene una suscripción a Virtual Pro?
Para acceder a este contenido se requiere una suscripción
Obtenga beneficios adicionales
Aún no tiene una suscripción a Virtual Pro?
Para acceder a este contenido se requiere una suscripción
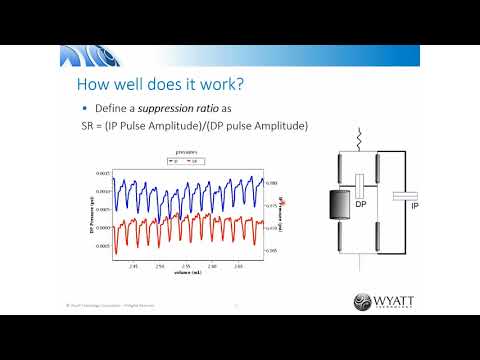
La localización de vehículos aéreos no tripulados (UAVs) se ha convertido en algo crucial en los últimos años, principalmente para la navegación o el auto-posicionamiento y para la monitorización y vigilancia de la seguridad basada en UAVs. En este trabajo se considera el posicionamiento radioeléctrico en acimut y elevación de los UAV. La localización se basa en múltiples medidas diferenciales de fase de llegada explotando un conjunto lineal uniforme de 3 antenas. Se aplica un algoritmo de filtrado de partículas ad hoc para mejorar el rendimiento del posicionamiento utilizando un modelo de movimiento dinámico. Se propone un nuevo algoritmo adaptativo, el Particles Swarm Adaptive Scattering (PSAS), para aumentar la estabilidad y precisión del algoritmo. Para evaluar el rendimiento se ha desarrollado un algoritmo de Emulador de Trayectoria Aérea Aleatoria de Área Confinada (CARATE) para generar trayectorias reales de UAVs en vuelo. El rendimiento del algoritmo se compara con el método de referencia y con el límite inferior de Cramér Rao de trayectoria media para mostrar la eficacia del algoritmo propuesto.
Esta es una versión de prueba de citación de documentos de la Biblioteca Virtual Pro. Puede contener errores. Lo invitamos a consultar los manuales de citación de las respectivas fuentes.
Artículo:
Detección de daños estructurales mediante vibraciones no lineales
Artículo:
Experimentación de reproducibilidad entre software de inspección asistida por ordenador a partir de una única nube de puntos
Artículo:
Modelización y análisis de la dinámica de lanzamiento horizontal hacia atrás
Artículo:
Control de retroalimentación de salida adaptable y robusto para un cohete giratorio guiado
Artículo:
Estrategia de optimización de la asignación para el control de alta precisión de picosatélites y nanosatélites
Folleto:
Análisis de rentabilidad económica y financiera
Artículo:
¿Por qué debemos conservar la fauna silvestre?
Artículo:
Control y vigilancia de la calidad del agua de consumo humano
Manual:
Deshidratación y desecado de frutas, hortalizas y hongos. Procedimientos hogareños y comerciales de pequeña escala
Virtual Pro es un portal virtual de formación, investigación y comunicación especializado en procesos industriales.

� 2021, Virtual Pro �, una marca de Grupo INGCO. Todos los derechos reservados