Obtenga beneficios adicionales
Aún no tiene una suscripción a Virtual Pro?
Para acceder a este contenido se requiere una suscripción
Obtenga beneficios adicionales
Aún no tiene una suscripción a Virtual Pro?
Para acceder a este contenido se requiere una suscripción
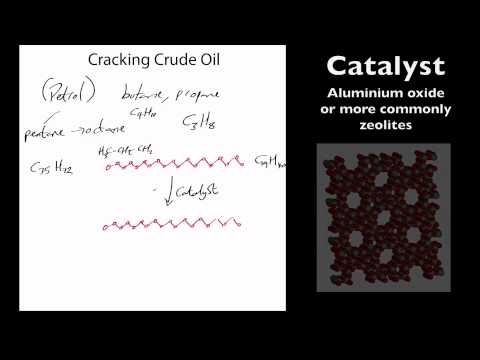
Para los robots móviles y los servicios basados en la localización, el posicionamiento preciso y en tiempo real es una de las capacidades más básicas, y las soluciones de posicionamiento de bajo coste son cada vez más demandadas y tienen un amplio potencial de mercado. En este artículo, diseñamos de forma innovadora un sistema de localización en interiores de alta precisión y en tiempo real basado en el posicionamiento por luz visible (VLP) y en un robot móvil. En primer lugar, diseñamos lámparas LED inteligentes con funciones de control VLC y Bluetooth para el posicionamiento. El diseño de las lámparas LED incluye el diseño del hardware y el control Bluetooth. Además, basándonos en las características de acoplamiento suelto de ROS (Robot Operator System), diseñamos un sistema robótico basado en VLP con información VLP transmitida por el LED diseñado, algoritmo de seguimiento dinámico de alta robustez, algoritmo de reconocimiento LED-ID y algoritmo de posicionamiento de triple luz. Implementamos el sistema de posicionamiento robótico basado en VLP sobre ROS en una oficina equipada con las lámparas LED diseñadas, que puede realizar una precisión de posicionamiento a nivel de cm de 3,231 cm y soportar una velocidad de movimiento de hasta 20 km/h aproximadamente. Este artículo impulsa el desarrollo de la aplicación de VLP en robots de interior, mostrando el gran potencial de VLP para el posicionamiento de robots de interior.
Esta es una versión de prueba de citación de documentos de la Biblioteca Virtual Pro. Puede contener errores. Lo invitamos a consultar los manuales de citación de las respectivas fuentes.
Artículo:
Las restricciones de las leyes de la termodinámica en la evolución de hidrocarburos : la prohibición de la génesis de hidrocarburos a presiones bajas
Infografía:
Guía - Gravedad y Órbitas
Video:
La Teoría de Cuerdas en 7 Minutos
Libro:
Transmisor de datos bidireccional por fibra óptica, entre computadoras
Artículo:
Optimización de un sistema difuso para la detección automática de tránsitos planetarios en curvas de luz de estrellas individuales
Folleto:
Análisis de rentabilidad económica y financiera
Artículo:
Control y vigilancia de la calidad del agua de consumo humano
Manual:
Deshidratación y desecado de frutas, hortalizas y hongos. Procedimientos hogareños y comerciales de pequeña escala
Artículo:
¿Por qué debemos conservar la fauna silvestre?
Virtual Pro es un portal virtual de formación, investigación y comunicación especializado en procesos industriales.

� 2021, Virtual Pro �, una marca de Grupo INGCO. Todos los derechos reservados